
-
Modal Kapasite Eğirisi otomatik elde edilir.
-
Modal Kapastie Eğrisi 'nden sonra itme eğrisi otomatik elde edilir.
SİMGELER
a1(X,k) = (X) deprem doğrultusu için k’ıncı itme adımında birinci moda ait modal tek serbestlik dereceli sistem’in modal sözde-ivmesi [m/s2]
d1(X,k) = (X) deprem doğrultusu için k’ıncı itme adımında birinci moda ait modal tek serbestlik dereceli sistem’in modal yerdeğiştirmesi [m]
mtx1(X,1) = (X) deprem doğrultusu için x ekseni doğrultusunda birinci itme adımında belirlenen ve itme hesabı boyunca hiç değiştirilmeyen sabit mod şekli ’ne göre hesaplanan taban kesme kuvveti modal etkin kütlesi [t]
mtxk(X,k) = (X) deprem doğrultusu için x ekseni doğrultusunda k 'ıncı itme adımında serbest titreşim hesabı ile yenilenen sabit mod şekli ’ne göre hesaplanan taban kesme kuvveti modal etkin kütlesi [t]
uix1(X,k) = (X) deprem doğrultusu için k’ıncı itme adımında i’inci katta x ekseni doğrultusunda hesaplanan yerdeğiştirme [m]
Δa1(X,k) = (X) deprem doğrultusu için k’ıncı itme adımında birinci moda ait modal tek serbestlik dereceli sistem ’in modal sözde-ivme artımı [m/s2]
Δd1(X,k) = (X) deprem doğrultusu için k ’ıncı itme adımında birinci moda ait modal tek serbestlik dereceli sistem ’in modal yerdeğiştirmesi [m]
ΦNx1(1) = N ’inci katta birinci itme adımında belirlenen ve itme hesabı boyunca hiç değiştirilmeyen sabit mod şekli ’nin x doğrultusundaki genliği
ΦNx1(k) = N ’inci katta birinci itme adımında belirlenen ve k 'ıncı itme adımında serbest titreşim hesabı ile yenilenen sabit mod şekli ’nin x doğrultusundaki genliği
Γ1(X,1) = (X) deprem doğrultusu için birinci itme adımında belirlenen ve itme hesabı boyunca hiç değiştirilmeyen sabit mod şekli ’ne göre hesaplanan modal katkı çarpanı
Γ1(X,k) = (X) deprem doğrultusu için her bir k ’ıncı itme adımında serbest titreşim hesabı ile yenilenen değişken mod şekli ’ne göre hesaplanan modal katkı çarpanı
ω1(k) = Her bir k ’ıncı itme adımında yenilenen serbest titreşim hesabından bulunan birinci mod doğal açısal frekansı [rad/s]
TBDY 5B.2.5 'te anlatıldığı şekilde, k 'ıncı itme adımında elde edilen Modal yerdeğiştirme artımı Δd1(X,k) kullanılarak TBDY Denklem 5B.10 'ile hesaplanan modal sözde ivme artımı Δa1(X,k) , bir önceki adımın sonunda elde edilen değerler ile toplanarak TBDY Denklem 5B.11 'deki şekilde elde edilir.

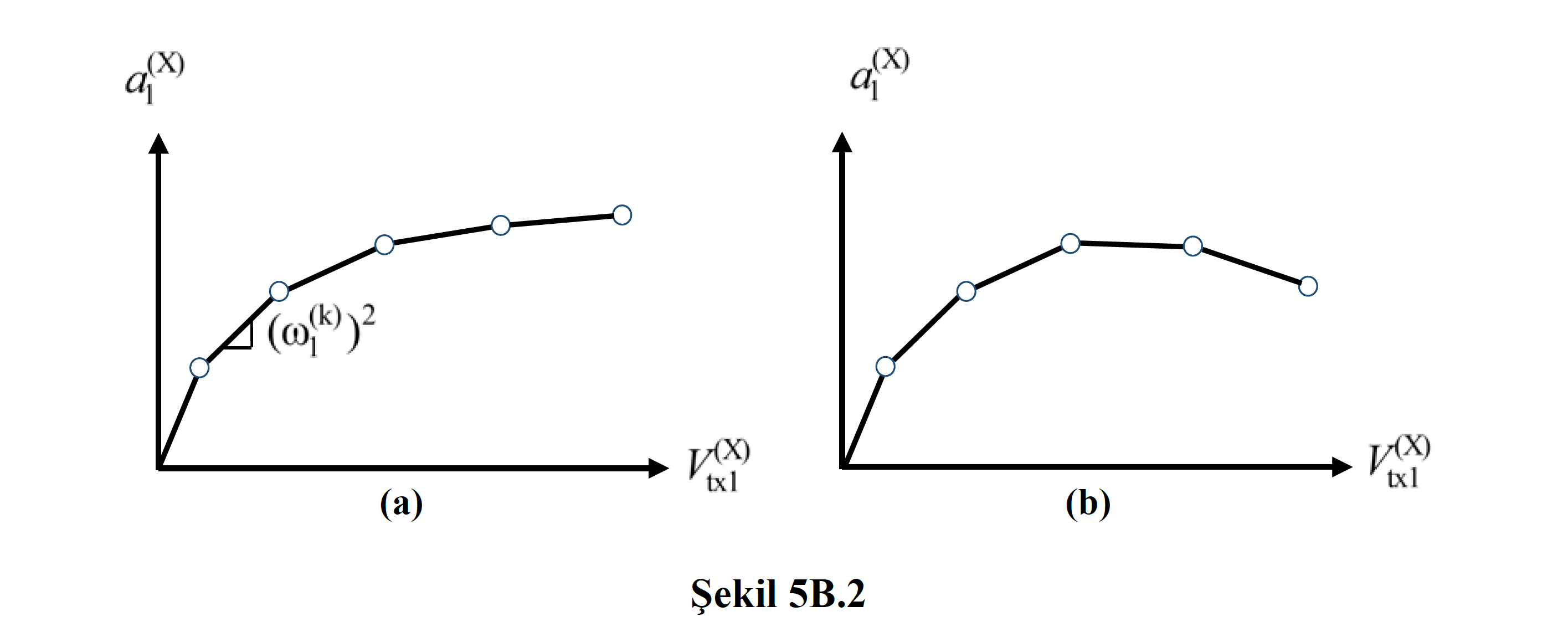
Böylece değişken yerdeğiştirme dağılımlı itme yöntemi 'nde, itme eğrisinin çizimine gerek olmaksızın koordinatları modal yerdeğiştirme – modal sözde-ivme olan modal kapasite diyagramı elde edilir. Bu diyagramda ardışık iki mafsal oluşumu arasındaki k 'ıncı itme adımında adım-adım doğrusal davranış 'ı temsiz eden doğru parçasının eğimi, TBDY Denklem 5B.10 uyarınca (ω1(k))2 'ye eşittir (Şekil 5B.2a).

Bina performans noktasının bulunması için koordinatları modal yerdeğiştirme – modal sözde-ivme olan modal kapasite diyagramı kullanılır ve böylece yerdeğiştirme talebi Yatay Elastik Tasarım Spektrumu kullanılarak elde edilebilir. Her bir k 'ıncı itme adımında TBDY Denklem 5B.11 ile elde edilen Modal yerdeğiştirme d1(X,k) ve modal sözde ivme a1(X,k) değerleri TBDY Denklem 5B.3 ve TBDY Denklem 5B.4 kullanılarak koordinatları taban kesme kuvveti-tepe yerdeğiştirmesi olan itme eğrisi 'ne dönüştürülür.
Ancak bu denklemler (TBDY Denklem 5B.3 ve TBDY Denklem 5B.4) Sabit Tek Modlu İtme Yöntemi için yazıldığından, denklemlerde bulunan terimlerin Değişken Tek Modlu İtme Yöntemi için yazılması gerekir.

TBDY Denklem 5B.3 'te verilen başlangıç adımında yapılan modal analizin birinci modunda elde edilen modal etkin kütle mtx1(X,1) yerine her bir k 'ıncı itme adımında yapılan serbest titreşim hesabından (modal analiz) elde edilen mod şekline göre hesaplanan i 'nci kattaki modal etkin kütleleri mix1(X,k) değerleri kullanılır.

TBDY Denklem 5B.4 'te verilen başlangıç adımında yapılan modal analizin birinci modunda (hakim mod) elde edilen N 'inci kattaki mod genliği ΦNx1(1) yerine her bir k 'ıncı itme adımında plastik mafsalların meydana getirdiği rijitlik değişimi dikkate alınarak yapılan modal analizin birinci modunda (hakim mod) elde edilen N 'inci kattaki mod genliği ΦNx1(k) kullanılır. Benzer şekilde başlangıç adımında yapılan modal analiz sonucunda elde edilen modal katkı çarpanı Γ1(X,1) değeri yerine her bir k 'ıncı itme adımında plastik mafsalların meydana getirdiği rijitlik değişimi dikkate alınarak yapılan modal analiz sonucunda hesaplanan modal katkı çarpanı Γ1(X,k) değeri kullanılır.
Performans noktasının elde edilmesiModal Yerdeğiştirme Talebinin Elde Edilmesi ve Performans Noktası (5B.3) başlığında detaylıca anlatılmıştır.
Sonraki Konu