Mod Şekilleri ve Modal Titreşim Periyotları
Dinamik analiz için kullanılan kütle modeli otomatik oluşturulur.
Mod şekilleri ve modal titreşim periyotları otomatik hesaplanır.
Simgeler
mi = i 'inci katın toplam kütlesi
miθ = i 'inci katın kütle eylemsizlik momenti
mj(S) = Tipik sonlu eleman düğüm noktası j'ye etkiyen tekil kütle
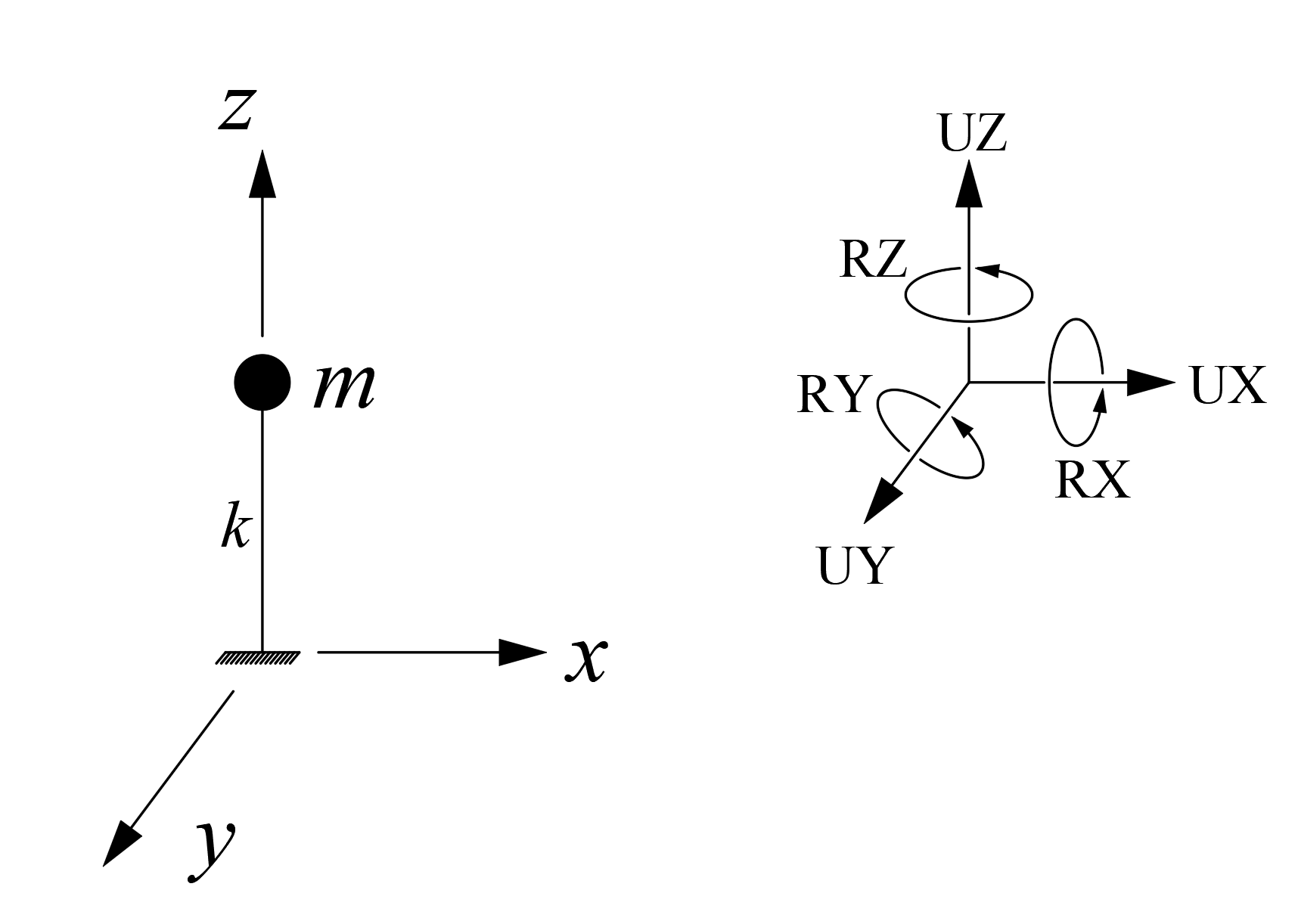
UX = Üç boyutlu analiz modelinde düğüm noktasının ( X ) yönünde yaptığı öteleme
UY = Üç boyutlu analiz modelinde düğüm noktasının ( Y ) yönünde yaptığı öteleme
UZ = Üç boyutlu analiz modelinde düğüm noktasının ( Z ) yönünde yaptığı öteleme
RX = Üç boyutlu analiz modelinde düğüm noktasının ( X ) ekseni etrafında yaptığı dönme
RY = Üç boyutlu analiz modelinde düğüm noktasının ( Y ) ekseni etrafında yaptığı dönme
RZ = Üç boyutlu analiz modelinde düğüm noktasının ( Z ) ekseni etrafında yaptığı dönme
Çok Serbestlik Dereceli Sistemlerin Dinamik Davranışları
Bir yapı sisteminin serbestlik derecesi, hareket halindeki sistemin konumunu belirlemek için gerekli bağımsız değişkenlerin sayısıdır. Eğer bu bağımsız değişkenlerden birden fazlasının bilinmesi gerekiyorsa bu sistemler çok serbestlik dereceli sistemlerdir. Üç boyutlu dinamik analiz uygulamasında çok serbestlik dereceli sistemler kullanılır ve x,y ve z eksenleri doğrultularındaki yerdeğiştirmeler ve bu eksenler etrafındaki dönmeler olmak üzere 6 bağımsız değişken gözönüne alınır. Gerçekte tüm sistemler sürekli kütlelerden oluşur. Ancak sonlu elemanlar ile dinamik analiz yapılırken kütleler eleman düğüm noktalarında toplandığı kabul edilir.
Ayrıca Bknz. : Tam ve Yarı Rijit Diyafram
Çok serbestlik dereceli sistemlerin dinamik davranışları aşağıdaki diferansiyel denklem takımı ile ifade edilir. Bu denklem aynı zamanda hareket denklemi olarak da isimlendirilir.
%5c%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMAIN-5B' d='M118 -250V750H255V710H158V-210H255V-250H118Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6D' d='M21 287Q22 293 24 303T36 341T56 388T88 425T132 442T175 435T205 417T221 395T229 376L231 369Q231 367 232 367L243 378Q303 442 384 442Q401 442 415 440T441 433T460 423T475 411T485 398T493 385T497 373T500 364T502 357L510 367Q573 442 659 442Q713 442 746 415T780 336Q780 285 742 178T704 50Q705 36 709 31T724 26Q752 26 776 56T815 138Q818 149 821 151T837 153Q857 153 857 145Q857 144 853 130Q845 101 831 73T785 17T716 -10Q669 -10 648 17T627 73Q627 92 663 193T700 345Q700 404 656 404H651Q565 404 506 303L499 291L466 157Q433 26 428 16Q415 -11 385 -11Q372 -11 364 -4T353 8T350 18Q350 29 384 161L420 307Q423 322 423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 181Q151 335 151 342Q154 357 154 369Q154 405 129 405Q107 405 92 377T69 316T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-5D' d='M22 710V750H159V-250H22V-210H119V710H22Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7B' d='M434 -231Q434 -244 428 -250H410Q281 -250 230 -184Q225 -177 222 -172T217 -161T213 -148T211 -133T210 -111T209 -84T209 -47T209 0Q209 21 209 53Q208 142 204 153Q203 154 203 155Q189 191 153 211T82 231Q71 231 68 234T65 250T68 266T82 269Q116 269 152 289T203 345Q208 356 208 377T209 529V579Q209 634 215 656T244 698Q270 724 324 740Q361 748 377 749Q379 749 390 749T408 750H428Q434 744 434 732Q434 719 431 716Q429 713 415 713Q362 710 332 689T296 647Q291 634 291 499V417Q291 370 288 353T271 314Q240 271 184 255L170 250L184 245Q202 239 220 230T262 196T290 137Q291 131 291 1Q291 -134 296 -147Q306 -174 339 -192T415 -213Q429 -213 431 -216Q434 -219 434 -231Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-A8' d='M95 612Q95 633 112 651T153 669T193 652T210 612Q210 588 194 571T152 554L127 560Q95 577 95 612ZM289 611Q289 634 304 649T335 668Q336 668 340 668T346 669Q369 669 386 652T404 612T387 572T346 554Q323 554 306 570T289 611Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7D' d='M65 731Q65 745 68 747T88 750Q171 750 216 725T279 670Q288 649 289 635T291 501Q292 362 293 357Q306 312 345 291T417 269Q428 269 431 266T434 250T431 234T417 231Q380 231 345 210T298 157Q293 143 292 121T291 -28V-79Q291 -134 285 -156T256 -198Q202 -250 89 -250Q71 -250 68 -247T65 -230Q65 -224 65 -223T66 -218T69 -214T77 -213Q91 -213 108 -210T146 -200T183 -177T207 -139Q208 -134 209 3L210 139Q223 196 280 230Q315 247 330 250Q305 257 280 270Q225 304 212 352L210 362L209 498Q208 635 207 640Q195 680 154 696T77 713Q68 713 67 716T65 731Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-63' d='M34 159Q34 268 120 355T306 442Q362 442 394 418T427 355Q427 326 408 306T360 285Q341 285 330 295T319 325T330 359T352 380T366 386H367Q367 388 361 392T340 400T306 404Q276 404 249 390Q228 381 206 359Q162 315 142 235T121 119Q121 73 147 50Q169 26 205 26H209Q321 26 394 111Q403 121 406 121Q410 121 419 112T429 98T420 83T391 55T346 25T282 0T202 -11Q127 -11 81 37T34 159Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2D9' d='M190 609Q190 637 208 653T252 669Q275 667 292 652T309 609Q309 579 292 564T250 549Q225 549 208 564T190 609Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6B' d='M121 647Q121 657 125 670T137 683Q138 683 209 688T282 694Q294 694 294 686Q294 679 244 477Q194 279 194 272Q213 282 223 291Q247 309 292 354T362 415Q402 442 438 442Q468 442 485 423T503 369Q503 344 496 327T477 302T456 291T438 288Q418 288 406 299T394 328Q394 353 410 369T442 390L458 393Q446 405 434 405H430Q398 402 367 380T294 316T228 255Q230 254 243 252T267 246T293 238T320 224T342 206T359 180T365 147Q365 130 360 106T354 66Q354 26 381 26Q429 26 459 145Q461 153 479 153H483Q499 153 499 144Q499 139 496 130Q455 -11 378 -11Q333 -11 305 15T277 90Q277 108 280 121T283 145Q283 167 269 183T234 206T200 217T182 220H180Q168 178 159 139T145 81T136 44T129 20T122 7T111 -2Q98 -11 83 -11Q66 -11 57 -1T48 16Q48 26 85 176T158 471L195 616Q196 629 188 632T149 637H144Q134 637 131 637T124 640T121 647Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-70' d='M23 287Q24 290 25 295T30 317T40 348T55 381T75 411T101 433T134 442Q209 442 230 378L240 387Q302 442 358 442Q423 442 460 395T497 281Q497 173 421 82T249 -10Q227 -10 210 -4Q199 1 187 11T168 28L161 36Q160 35 139 -51T118 -138Q118 -144 126 -145T163 -148H188Q194 -155 194 -157T191 -175Q188 -187 185 -190T172 -194Q170 -194 161 -194T127 -193T65 -192Q-5 -192 -24 -194H-32Q-39 -187 -39 -183Q-37 -156 -26 -148H-6Q28 -147 33 -136Q36 -130 94 103T155 350Q156 355 156 364Q156 405 131 405Q109 405 94 377T71 316T59 280Q57 278 43 278H29Q23 284 23 287ZM178 102Q200 26 252 26Q282 26 310 49T356 107Q374 141 392 215T411 325V331Q411 405 350 405Q339 405 328 402T306 393T286 380T269 365T254 350T243 336T235 326L232 322Q232 321 229 308T218 264T204 212Q178 106 178 102Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-74' d='M26 385Q19 392 19 395Q19 399 22 411T27 425Q29 430 36 430T87 431H140L159 511Q162 522 166 540T173 566T179 586T187 603T197 615T211 624T229 626Q247 625 254 615T261 596Q261 589 252 549T232 470L222 433Q222 431 272 431H323Q330 424 330 420Q330 398 317 385H210L174 240Q135 80 135 68Q135 26 162 26Q197 26 230 60T283 144Q285 150 288 151T303 153H307Q322 153 322 145Q322 142 319 133Q314 117 301 95T267 48T216 6T155 -11Q125 -11 98 4T59 56Q57 64 57 83V101L92 241Q127 382 128 383Q128 385 77 385H26Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='278' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='1157' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='1435' y='0'%3e%3c/use%3e %3cg transform='translate(1936%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-A8' x='63' y='-3'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='2508' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='3231' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='4231' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-63' x='4510' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='4943' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='5222' y='0'%3e%3c/use%3e %3cg transform='translate(5722%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='63' y='2'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='6295' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='7018' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='8018' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6B' x='8297' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='8818' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='9097' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='9597' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='10170' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='10948' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='12004' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-70' x='12505' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='13008' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-74' x='13398' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='13759' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='14149' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Burada ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(500%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-A8' x='63' y='-3'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='1073' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) ,
, ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(500%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='63' y='2'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='1073' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) ,
, ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='1073' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) sırasıyla ivme, hız ve yerdeğiştirme vektörlerini, {p(t)} yük vektörünü, [m], [c], [k] kütle, sönüm ve rijitlik matrislerini göstermektedir.
sırasıyla ivme, hız ve yerdeğiştirme vektörlerini, {p(t)} yük vektörünü, [m], [c], [k] kütle, sönüm ve rijitlik matrislerini göstermektedir.
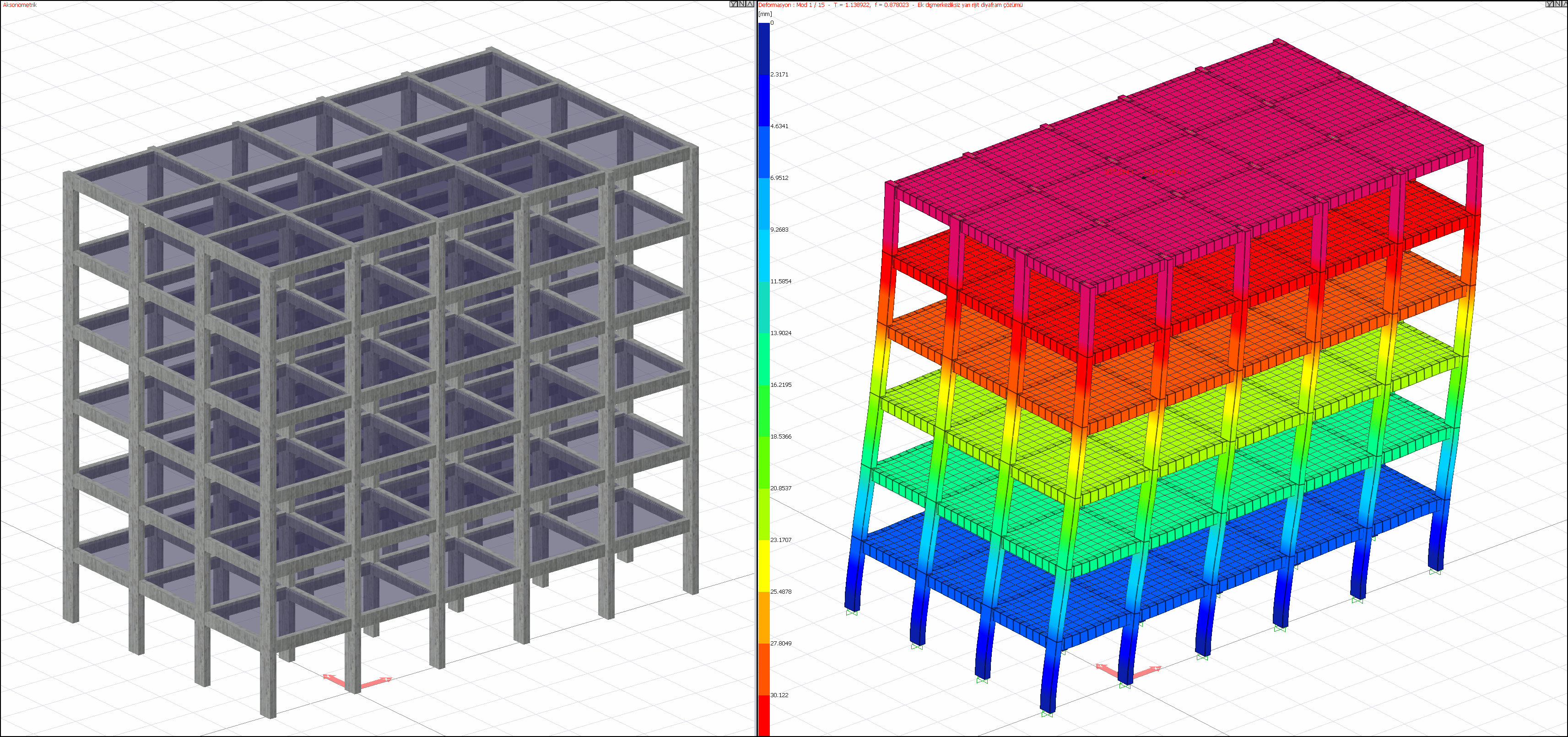
Kütle matrisi [m], rijit diyafram ve yarı rijit diyaframlı sistemlerde farklılık gösterir. Tam rijit diyafram ile çözülen sistemlerde kütleler kat ağırlık merkezinde toplanarak dinamik analiz yapılmaktadır. Aşağıdaki resimde tam rijit diyafram ile çözülen bir yapının 1. mod şekli bulunmaktadır. Tam rijit diyafram ile dinamik analiz yapılan sistemde şekilde de görüldüğü gibi kütleler kat ağırlık merkezinde toplanmıştır.
Tam rijit diyafram ile çözülen sistemlerde kütleler kat ağırlık merkezinde toplanarak dinamik analiz yapılmaktadır. TBDY 4B.1.3(a) maddesinde belirtilen mi değeri kat ağırlık merkezinden toplanan kütleleri ifade etmektedir. herhangi bir i’inci kat döşemesinin kütle merkezinde x ve y yatay doğrultularında tanımlanan yerdeğiştirmeler ile kat kütle merkezinden geçen düşey eksen etrafındaki dönme dikkate alınmış ve bu serbestlik derecelerine karşı gelen kat kütlesi mi ile kat kütle eylemsizlik momenti miθ tanımlanmıştır. Yukarıdaki şekilde tam rijit diyafram ile dinamik analiz yapılan sistemde kat ağırlık merkezinde toplanan kütleler, TBDY 4B.1 'de anlatılan mi terimini ifade eder.
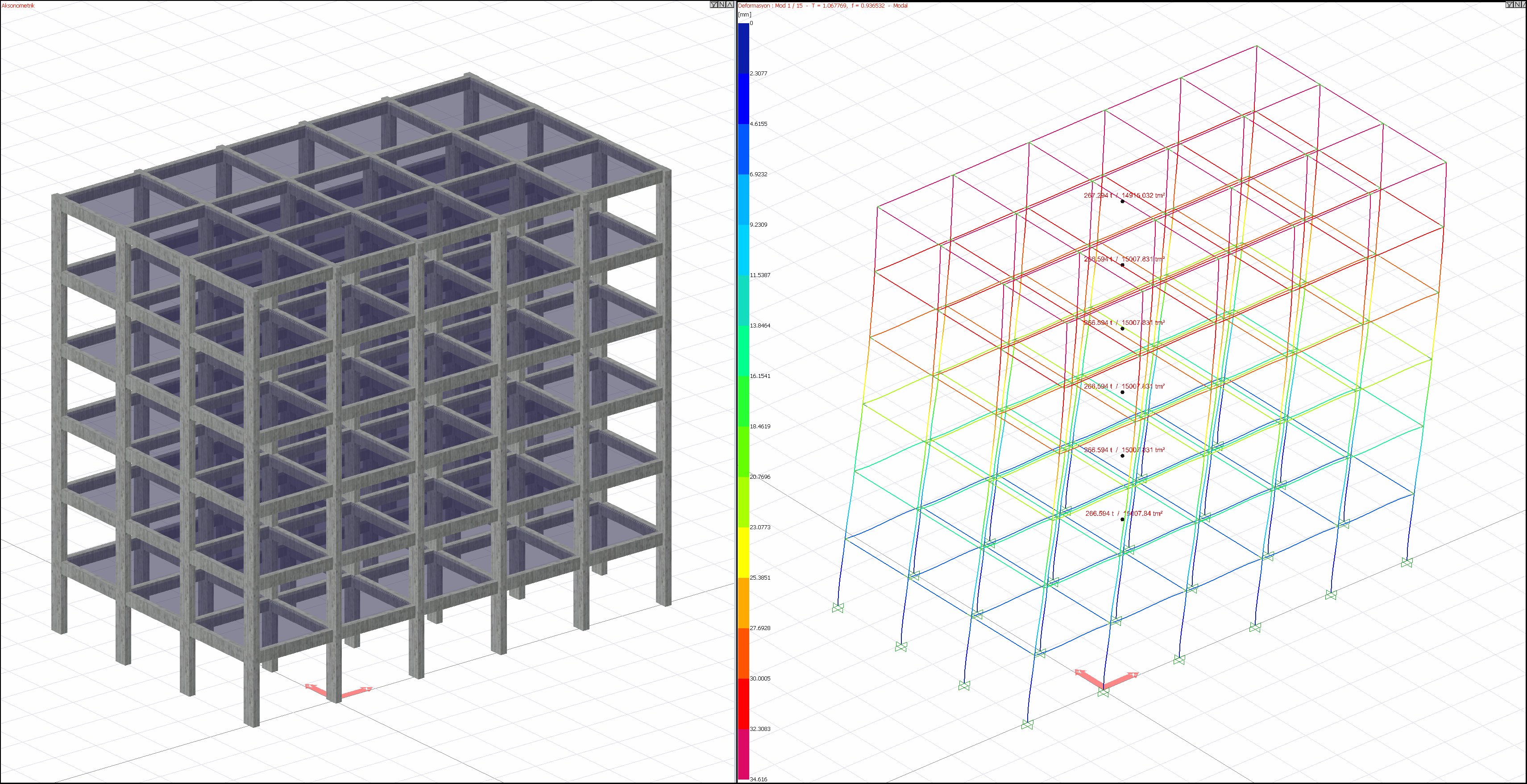
Yarı rijit diyafram ile çözülen sistemlerde kütleler sonlu elemanların düğüm noktalarında tanımlanır ve dinamik analiz yapılır. Aşağıdaki resimde yarı rijit diyafram ile çözülen bir yapının 1. mod şekli bulunmaktadır.
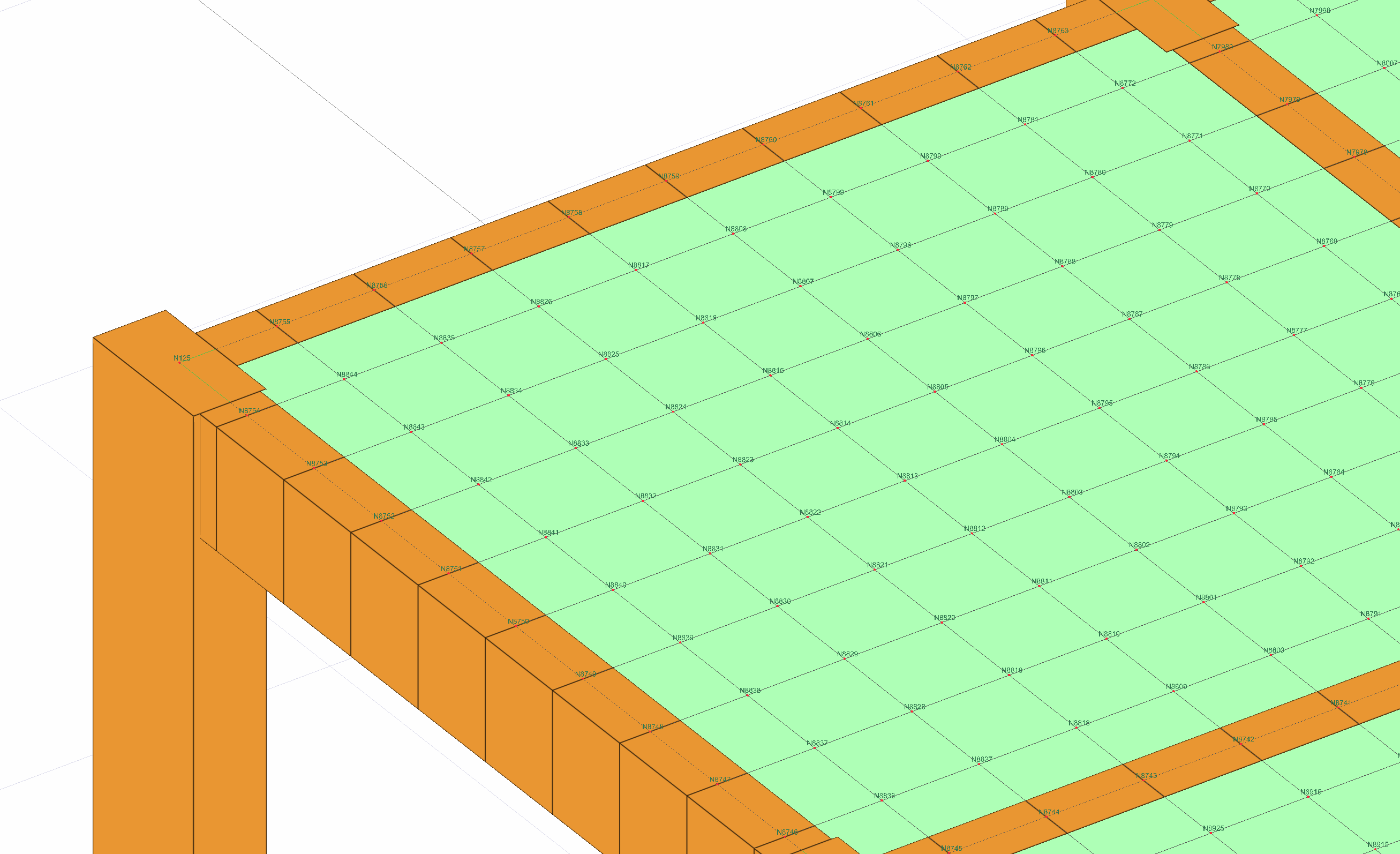
Yarı rijit diyafram ile dinamik analizi yapılan sistemlerde kütleler sonlu elemanların düğüm noktalarında tanımlanmıştır. TBDY 4B.1.3(b) maddesinde belirtilen mi değeri, kat döşemelerinin rijit diyafram olarak alınması durumunda kat ağırlık merkezinde toplanan kütle değerine karşılık gelmektedir. TBDY 4B.1.3(b) maddesinde belirtilen mj(S) değeri ise kat döşemelerinin kendi düzlemleri içindeki yerdeğiştirmelere ilişkin serbestlik derecelerini içeren iki boyutlu sonlu elemanlar ile modellenen elemanların düğüm noktalarında tanımlanan kütlelerdir. mj(S) terimindeki j indisi her bir düğüm noktası için kullanılmaktadır ve aşağıda gösterilen analiz modelindeki düğüm noktalarına karşılık gelmektedir.
Mod Şekilleri ve Modal Titreşim Periyotları
Bir yapı sisteminin mod şekilleri ve titreşim periyotları, dış yükün olmadığı sönümsüz serbest titreşim durumundaki hareket denklemi çözümünden elde edilir. Bu durumda hareket denkleminde sönümün ve dış yükün olmadığı durum aşağıdaki gibi ifade edilir.
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='278' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='1157' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='1435' y='0'%3e%3c/use%3e %3cg transform='translate(1936%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-A8' x='63' y='-3'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='2508' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='3231' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='4231' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6B' x='4510' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='5031' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='5310' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='5810' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='6383' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='7161' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='8218' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='8718' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='9219' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Serbest titreşim hareketi basit harmonik bir harekettir ve sinüs fonksiyonu ile ifade edilir. Bu durumda yerdeğiştirmeler {x} aşağıdaki denklem ile elde edilir.
%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMAIN-7B' d='M434 -231Q434 -244 428 -250H410Q281 -250 230 -184Q225 -177 222 -172T217 -161T213 -148T211 -133T210 -111T209 -84T209 -47T209 0Q209 21 209 53Q208 142 204 153Q203 154 203 155Q189 191 153 211T82 231Q71 231 68 234T65 250T68 266T82 269Q116 269 152 289T203 345Q208 356 208 377T209 529V579Q209 634 215 656T244 698Q270 724 324 740Q361 748 377 749Q379 749 390 749T408 750H428Q434 744 434 732Q434 719 431 716Q429 713 415 713Q362 710 332 689T296 647Q291 634 291 499V417Q291 370 288 353T271 314Q240 271 184 255L170 250L184 245Q202 239 220 230T262 196T290 137Q291 131 291 1Q291 -134 296 -147Q306 -174 339 -192T415 -213Q429 -213 431 -216Q434 -219 434 -231Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7D' d='M65 731Q65 745 68 747T88 750Q171 750 216 725T279 670Q288 649 289 635T291 501Q292 362 293 357Q306 312 345 291T417 269Q428 269 431 266T434 250T431 234T417 231Q380 231 345 210T298 157Q293 143 292 121T291 -28V-79Q291 -134 285 -156T256 -198Q202 -250 89 -250Q71 -250 68 -247T65 -230Q65 -224 65 -223T66 -218T69 -214T77 -213Q91 -213 108 -210T146 -200T183 -177T207 -139Q208 -134 209 3L210 139Q223 196 280 230Q315 247 330 250Q305 257 280 270Q225 304 212 352L210 362L209 498Q208 635 207 640Q195 680 154 696T77 713Q68 713 67 716T65 731Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-41' d='M208 74Q208 50 254 46Q272 46 272 35Q272 34 270 22Q267 8 264 4T251 0Q249 0 239 0T205 1T141 2Q70 2 50 0H42Q35 7 35 11Q37 38 48 46H62Q132 49 164 96Q170 102 345 401T523 704Q530 716 547 716H555H572Q578 707 578 706L606 383Q634 60 636 57Q641 46 701 46Q726 46 726 36Q726 34 723 22Q720 7 718 4T704 0Q701 0 690 0T651 1T578 2Q484 2 455 0H443Q437 6 437 9T439 27Q443 40 445 43L449 46H469Q523 49 533 63L521 213H283L249 155Q208 86 208 74ZM516 260Q516 271 504 416T490 562L463 519Q447 492 400 412L310 260L413 259Q516 259 516 260Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-73' d='M131 289Q131 321 147 354T203 415T300 442Q362 442 390 415T419 355Q419 323 402 308T364 292Q351 292 340 300T328 326Q328 342 337 354T354 372T367 378Q368 378 368 379Q368 382 361 388T336 399T297 405Q249 405 227 379T204 326Q204 301 223 291T278 274T330 259Q396 230 396 163Q396 135 385 107T352 51T289 7T195 -10Q118 -10 86 19T53 87Q53 126 74 143T118 160Q133 160 146 151T160 120Q160 94 142 76T111 58Q109 57 108 57T107 55Q108 52 115 47T146 34T201 27Q237 27 263 38T301 66T318 97T323 122Q323 150 302 164T254 181T195 196T148 231Q131 256 131 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-69' d='M184 600Q184 624 203 642T247 661Q265 661 277 649T290 619Q290 596 270 577T226 557Q211 557 198 567T184 600ZM21 287Q21 295 30 318T54 369T98 420T158 442Q197 442 223 419T250 357Q250 340 236 301T196 196T154 83Q149 61 149 51Q149 26 166 26Q175 26 185 29T208 43T235 78T260 137Q263 149 265 151T282 153Q302 153 302 143Q302 135 293 112T268 61T223 11T161 -11Q129 -11 102 10T74 74Q74 91 79 106T122 220Q160 321 166 341T173 380Q173 404 156 404H154Q124 404 99 371T61 287Q60 286 59 284T58 281T56 279T53 278T49 278T41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6E' d='M21 287Q22 293 24 303T36 341T56 388T89 425T135 442Q171 442 195 424T225 390T231 369Q231 367 232 367L243 378Q304 442 382 442Q436 442 469 415T503 336T465 179T427 52Q427 26 444 26Q450 26 453 27Q482 32 505 65T540 145Q542 153 560 153Q580 153 580 145Q580 144 576 130Q568 101 554 73T508 17T439 -10Q392 -10 371 17T350 73Q350 92 386 193T423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 180T152 343Q153 348 153 366Q153 405 129 405Q91 405 66 305Q60 285 60 284Q58 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-74' d='M26 385Q19 392 19 395Q19 399 22 411T27 425Q29 430 36 430T87 431H140L159 511Q162 522 166 540T173 566T179 586T187 603T197 615T211 624T229 626Q247 625 254 615T261 596Q261 589 252 549T232 470L222 433Q222 431 272 431H323Q330 424 330 420Q330 398 317 385H210L174 240Q135 80 135 68Q135 26 162 26Q197 26 230 60T283 144Q285 150 288 151T303 153H307Q322 153 322 145Q322 142 319 133Q314 117 301 95T267 48T216 6T155 -11Q125 -11 98 4T59 56Q57 64 57 83V101L92 241Q127 382 128 383Q128 385 77 385H26Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='1073' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1851' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='2907' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-41' x='3408' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='4158' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-73' x='4659' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-69' x='5128' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6E' x='5474' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='6074' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='6464' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-74' x='7086' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='7448' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Bu denklemde {A} hareketin genlik vektörünü ve ω açısal frekansı göstermektedir. {x} denkeleminin zamana göre ikinci türevi ile denklemi elde edilir ve bu matris ivme değerlerini göstermektedir.
%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMAIN-7B' d='M434 -231Q434 -244 428 -250H410Q281 -250 230 -184Q225 -177 222 -172T217 -161T213 -148T211 -133T210 -111T209 -84T209 -47T209 0Q209 21 209 53Q208 142 204 153Q203 154 203 155Q189 191 153 211T82 231Q71 231 68 234T65 250T68 266T82 269Q116 269 152 289T203 345Q208 356 208 377T209 529V579Q209 634 215 656T244 698Q270 724 324 740Q361 748 377 749Q379 749 390 749T408 750H428Q434 744 434 732Q434 719 431 716Q429 713 415 713Q362 710 332 689T296 647Q291 634 291 499V417Q291 370 288 353T271 314Q240 271 184 255L170 250L184 245Q202 239 220 230T262 196T290 137Q291 131 291 1Q291 -134 296 -147Q306 -174 339 -192T415 -213Q429 -213 431 -216Q434 -219 434 -231Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-A8' d='M95 612Q95 633 112 651T153 669T193 652T210 612Q210 588 194 571T152 554L127 560Q95 577 95 612ZM289 611Q289 634 304 649T335 668Q336 668 340 668T346 669Q369 669 386 652T404 612T387 572T346 554Q323 554 306 570T289 611Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7D' d='M65 731Q65 745 68 747T88 750Q171 750 216 725T279 670Q288 649 289 635T291 501Q292 362 293 357Q306 312 345 291T417 269Q428 269 431 266T434 250T431 234T417 231Q380 231 345 210T298 157Q293 143 292 121T291 -28V-79Q291 -134 285 -156T256 -198Q202 -250 89 -250Q71 -250 68 -247T65 -230Q65 -224 65 -223T66 -218T69 -214T77 -213Q91 -213 108 -210T146 -200T183 -177T207 -139Q208 -134 209 3L210 139Q223 196 280 230Q315 247 330 250Q305 257 280 270Q225 304 212 352L210 362L209 498Q208 635 207 640Q195 680 154 696T77 713Q68 713 67 716T65 731Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-41' d='M208 74Q208 50 254 46Q272 46 272 35Q272 34 270 22Q267 8 264 4T251 0Q249 0 239 0T205 1T141 2Q70 2 50 0H42Q35 7 35 11Q37 38 48 46H62Q132 49 164 96Q170 102 345 401T523 704Q530 716 547 716H555H572Q578 707 578 706L606 383Q634 60 636 57Q641 46 701 46Q726 46 726 36Q726 34 723 22Q720 7 718 4T704 0Q701 0 690 0T651 1T578 2Q484 2 455 0H443Q437 6 437 9T439 27Q443 40 445 43L449 46H469Q523 49 533 63L521 213H283L249 155Q208 86 208 74ZM516 260Q516 271 504 416T490 562L463 519Q447 492 400 412L310 260L413 259Q516 259 516 260Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-73' d='M131 289Q131 321 147 354T203 415T300 442Q362 442 390 415T419 355Q419 323 402 308T364 292Q351 292 340 300T328 326Q328 342 337 354T354 372T367 378Q368 378 368 379Q368 382 361 388T336 399T297 405Q249 405 227 379T204 326Q204 301 223 291T278 274T330 259Q396 230 396 163Q396 135 385 107T352 51T289 7T195 -10Q118 -10 86 19T53 87Q53 126 74 143T118 160Q133 160 146 151T160 120Q160 94 142 76T111 58Q109 57 108 57T107 55Q108 52 115 47T146 34T201 27Q237 27 263 38T301 66T318 97T323 122Q323 150 302 164T254 181T195 196T148 231Q131 256 131 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-69' d='M184 600Q184 624 203 642T247 661Q265 661 277 649T290 619Q290 596 270 577T226 557Q211 557 198 567T184 600ZM21 287Q21 295 30 318T54 369T98 420T158 442Q197 442 223 419T250 357Q250 340 236 301T196 196T154 83Q149 61 149 51Q149 26 166 26Q175 26 185 29T208 43T235 78T260 137Q263 149 265 151T282 153Q302 153 302 143Q302 135 293 112T268 61T223 11T161 -11Q129 -11 102 10T74 74Q74 91 79 106T122 220Q160 321 166 341T173 380Q173 404 156 404H154Q124 404 99 371T61 287Q60 286 59 284T58 281T56 279T53 278T49 278T41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6E' d='M21 287Q22 293 24 303T36 341T56 388T89 425T135 442Q171 442 195 424T225 390T231 369Q231 367 232 367L243 378Q304 442 382 442Q436 442 469 415T503 336T465 179T427 52Q427 26 444 26Q450 26 453 27Q482 32 505 65T540 145Q542 153 560 153Q580 153 580 145Q580 144 576 130Q568 101 554 73T508 17T439 -10Q392 -10 371 17T350 73Q350 92 386 193T423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 180T152 343Q153 348 153 366Q153 405 129 405Q91 405 66 305Q60 285 60 284Q58 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-74' d='M26 385Q19 392 19 395Q19 399 22 411T27 425Q29 430 36 430T87 431H140L159 511Q162 522 166 540T173 566T179 586T187 603T197 615T211 624T229 626Q247 625 254 615T261 596Q261 589 252 549T232 470L222 433Q222 431 272 431H323Q330 424 330 420Q330 398 317 385H210L174 240Q135 80 135 68Q135 26 162 26Q197 26 230 60T283 144Q285 150 288 151T303 153H307Q322 153 322 145Q322 142 319 133Q314 117 301 95T267 48T216 6T155 -11Q125 -11 98 4T59 56Q57 64 57 83V101L92 241Q127 382 128 383Q128 385 77 385H26Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-67)'%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(500%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-A8' x='63' y='-3'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='1073' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1851' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2212' x='2907' y='0'%3e%3c/use%3e %3cg transform='translate(3686%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='880' y='583'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='4762' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-41' x='5262' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='6013' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-73' x='6513' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-69' x='6983' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6E' x='7328' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='7929' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='8318' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-74' x='8941' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='9302' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='278' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='1157' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='1435' y='0'%3e%3c/use%3e %3cg transform='translate(1936%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-A8' x='63' y='-3'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='2508' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='3231' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='4231' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6B' x='4510' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='5031' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='5310' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-78' x='5810' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='6383' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='7161' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='8218' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='8718' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='9219' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
{x} denkeleminin zamana göre ikinci türevi sönümüm ve dış yükün olmadığı hareket denklemi içerisinde yerine yazılırsa aşağıdaki gibi bir özdeğer problemi elde edilir.
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-67)'%3e %3cuse xlink:href='%23E1-MJMAIN-2212' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(778%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='880' y='583'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='1854' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='2133' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='3011' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='3290' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-41' x='3790' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='4541' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='5264' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6B' x='6264' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='6786' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-41' x='7286' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='8037' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='8815' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='9871' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='10372' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='10872' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
 = %5c%7b0%5c%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMAIN-7B' d='M434 -231Q434 -244 428 -250H410Q281 -250 230 -184Q225 -177 222 -172T217 -161T213 -148T211 -133T210 -111T209 -84T209 -47T209 0Q209 21 209 53Q208 142 204 153Q203 154 203 155Q189 191 153 211T82 231Q71 231 68 234T65 250T68 266T82 269Q116 269 152 289T203 345Q208 356 208 377T209 529V579Q209 634 215 656T244 698Q270 724 324 740Q361 748 377 749Q379 749 390 749T408 750H428Q434 744 434 732Q434 719 431 716Q429 713 415 713Q362 710 332 689T296 647Q291 634 291 499V417Q291 370 288 353T271 314Q240 271 184 255L170 250L184 245Q202 239 220 230T262 196T290 137Q291 131 291 1Q291 -134 296 -147Q306 -174 339 -192T415 -213Q429 -213 431 -216Q434 -219 434 -231Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-41' d='M208 74Q208 50 254 46Q272 46 272 35Q272 34 270 22Q267 8 264 4T251 0Q249 0 239 0T205 1T141 2Q70 2 50 0H42Q35 7 35 11Q37 38 48 46H62Q132 49 164 96Q170 102 345 401T523 704Q530 716 547 716H555H572Q578 707 578 706L606 383Q634 60 636 57Q641 46 701 46Q726 46 726 36Q726 34 723 22Q720 7 718 4T704 0Q701 0 690 0T651 1T578 2Q484 2 455 0H443Q437 6 437 9T439 27Q443 40 445 43L449 46H469Q523 49 533 63L521 213H283L249 155Q208 86 208 74ZM516 260Q516 271 504 416T490 562L463 519Q447 492 400 412L310 260L413 259Q516 259 516 260Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7D' d='M65 731Q65 745 68 747T88 750Q171 750 216 725T279 670Q288 649 289 635T291 501Q292 362 293 357Q306 312 345 291T417 269Q428 269 431 266T434 250T431 234T417 231Q380 231 345 210T298 157Q293 143 292 121T291 -28V-79Q291 -134 285 -156T256 -198Q202 -250 89 -250Q71 -250 68 -247T65 -230Q65 -224 65 -223T66 -218T69 -214T77 -213Q91 -213 108 -210T146 -200T183 -177T207 -139Q208 -134 209 3L210 139Q223 196 280 230Q315 247 330 250Q305 257 280 270Q225 304 212 352L210 362L209 498Q208 635 207 640Q195 680 154 696T77 713Q68 713 67 716T65 731Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ3-28' d='M701 -940Q701 -943 695 -949H664Q662 -947 636 -922T591 -879T537 -818T475 -737T412 -636T350 -511T295 -362T250 -186T221 17T209 251Q209 962 573 1361Q596 1386 616 1405T649 1437T664 1450H695Q701 1444 701 1441Q701 1436 681 1415T629 1356T557 1261T476 1118T400 927T340 675T308 359Q306 321 306 250Q306 -139 400 -430T690 -924Q701 -936 701 -940Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-5B' d='M118 -250V750H255V710H158V-210H255V-250H118Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6B' d='M121 647Q121 657 125 670T137 683Q138 683 209 688T282 694Q294 694 294 686Q294 679 244 477Q194 279 194 272Q213 282 223 291Q247 309 292 354T362 415Q402 442 438 442Q468 442 485 423T503 369Q503 344 496 327T477 302T456 291T438 288Q418 288 406 299T394 328Q394 353 410 369T442 390L458 393Q446 405 434 405H430Q398 402 367 380T294 316T228 255Q230 254 243 252T267 246T293 238T320 224T342 206T359 180T365 147Q365 130 360 106T354 66Q354 26 381 26Q429 26 459 145Q461 153 479 153H483Q499 153 499 144Q499 139 496 130Q455 -11 378 -11Q333 -11 305 15T277 90Q277 108 280 121T283 145Q283 167 269 183T234 206T200 217T182 220H180Q168 178 159 139T145 81T136 44T129 20T122 7T111 -2Q98 -11 83 -11Q66 -11 57 -1T48 16Q48 26 85 176T158 471L195 616Q196 629 188 632T149 637H144Q134 637 131 637T124 640T121 647Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-5D' d='M22 710V750H159V-250H22V-210H119V710H22Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6D' d='M21 287Q22 293 24 303T36 341T56 388T88 425T132 442T175 435T205 417T221 395T229 376L231 369Q231 367 232 367L243 378Q303 442 384 442Q401 442 415 440T441 433T460 423T475 411T485 398T493 385T497 373T500 364T502 357L510 367Q573 442 659 442Q713 442 746 415T780 336Q780 285 742 178T704 50Q705 36 709 31T724 26Q752 26 776 56T815 138Q818 149 821 151T837 153Q857 153 857 145Q857 144 853 130Q845 101 831 73T785 17T716 -10Q669 -10 648 17T627 73Q627 92 663 193T700 345Q700 404 656 404H651Q565 404 506 303L499 291L466 157Q433 26 428 16Q415 -11 385 -11Q372 -11 364 -4T353 8T350 18Q350 29 384 161L420 307Q423 322 423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 181Q151 335 151 342Q154 357 154 369Q154 405 129 405Q107 405 92 377T69 316T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ3-29' d='M34 1438Q34 1446 37 1448T50 1450H56H71Q73 1448 99 1423T144 1380T198 1319T260 1238T323 1137T385 1013T440 864T485 688T514 485T526 251Q526 134 519 53Q472 -519 162 -860Q139 -885 119 -904T86 -936T71 -949H56Q43 -949 39 -947T34 -937Q88 -883 140 -813Q428 -430 428 251Q428 453 402 628T338 922T245 1146T145 1309T46 1425Q44 1427 42 1429T39 1433T36 1436L34 1438Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-30' d='M96 585Q152 666 249 666Q297 666 345 640T423 548Q460 465 460 320Q460 165 417 83Q397 41 362 16T301 -15T250 -22Q224 -22 198 -16T137 16T82 83Q39 165 39 320Q39 494 96 585ZM321 597Q291 629 250 629Q208 629 178 597Q153 571 145 525T137 333Q137 175 145 125T181 46Q209 16 250 16Q290 16 318 46Q347 76 354 130T362 333Q362 478 354 524T321 597Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-41' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='1251' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJSZ3-28' x='1751' y='-1'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='2488' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6B' x='2766' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='3288' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2212' x='3788' y='0'%3e%3c/use%3e %3cg transform='translate(4789%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='880' y='583'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='5865' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='6144' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='7022' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJSZ3-29' x='7301' y='-1'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='8315' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='9371' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='9872' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='10372' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Elde edilen homojen lineer denklem sisteminin sıfırdan farklı bir çözümünün olması ancak katsayılar matrisinin determinantının sıfır olması ile mümkündür.
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-67)'%3e %3cuse xlink:href='%23E1-MJMAIN-7C' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='278' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6B' x='557' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='1078' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2212' x='1579' y='0'%3e%3c/use%3e %3cg transform='translate(2579%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='880' y='583'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='3656' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='3934' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='4813' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7C' x='5091' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='5648' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='6704' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Yukarıdaki determinantın açılımı yapıldığında i. dereceden bir polinom elde edilir. Bu polinomun kökleri ω2 özdeğerlerini verir. Bulunan her bir özdeğerin denklemde yerine yazılması ile her bir mod için özvektörler {Φ} bulunur. Herhangi bir n 'inci mod için aşağıdaki denklem sağlanmalıdır.
%5c%7b%ce%a6_n%5c%7d = %5c%7b0%5c%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ3-28' d='M701 -940Q701 -943 695 -949H664Q662 -947 636 -922T591 -879T537 -818T475 -737T412 -636T350 -511T295 -362T250 -186T221 17T209 251Q209 962 573 1361Q596 1386 616 1405T649 1437T664 1450H695Q701 1444 701 1441Q701 1436 681 1415T629 1356T557 1261T476 1118T400 927T340 675T308 359Q306 321 306 250Q306 -139 400 -430T690 -924Q701 -936 701 -940Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-5B' d='M118 -250V750H255V710H158V-210H255V-250H118Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6B' d='M121 647Q121 657 125 670T137 683Q138 683 209 688T282 694Q294 694 294 686Q294 679 244 477Q194 279 194 272Q213 282 223 291Q247 309 292 354T362 415Q402 442 438 442Q468 442 485 423T503 369Q503 344 496 327T477 302T456 291T438 288Q418 288 406 299T394 328Q394 353 410 369T442 390L458 393Q446 405 434 405H430Q398 402 367 380T294 316T228 255Q230 254 243 252T267 246T293 238T320 224T342 206T359 180T365 147Q365 130 360 106T354 66Q354 26 381 26Q429 26 459 145Q461 153 479 153H483Q499 153 499 144Q499 139 496 130Q455 -11 378 -11Q333 -11 305 15T277 90Q277 108 280 121T283 145Q283 167 269 183T234 206T200 217T182 220H180Q168 178 159 139T145 81T136 44T129 20T122 7T111 -2Q98 -11 83 -11Q66 -11 57 -1T48 16Q48 26 85 176T158 471L195 616Q196 629 188 632T149 637H144Q134 637 131 637T124 640T121 647Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-5D' d='M22 710V750H159V-250H22V-210H119V710H22Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6D' d='M21 287Q22 293 24 303T36 341T56 388T88 425T132 442T175 435T205 417T221 395T229 376L231 369Q231 367 232 367L243 378Q303 442 384 442Q401 442 415 440T441 433T460 423T475 411T485 398T493 385T497 373T500 364T502 357L510 367Q573 442 659 442Q713 442 746 415T780 336Q780 285 742 178T704 50Q705 36 709 31T724 26Q752 26 776 56T815 138Q818 149 821 151T837 153Q857 153 857 145Q857 144 853 130Q845 101 831 73T785 17T716 -10Q669 -10 648 17T627 73Q627 92 663 193T700 345Q700 404 656 404H651Q565 404 506 303L499 291L466 157Q433 26 428 16Q415 -11 385 -11Q372 -11 364 -4T353 8T350 18Q350 29 384 161L420 307Q423 322 423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 181Q151 335 151 342Q154 357 154 369Q154 405 129 405Q107 405 92 377T69 316T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ3-29' d='M34 1438Q34 1446 37 1448T50 1450H56H71Q73 1448 99 1423T144 1380T198 1319T260 1238T323 1137T385 1013T440 864T485 688T514 485T526 251Q526 134 519 53Q472 -519 162 -860Q139 -885 119 -904T86 -936T71 -949H56Q43 -949 39 -947T34 -937Q88 -883 140 -813Q428 -430 428 251Q428 453 402 628T338 922T245 1146T145 1309T46 1425Q44 1427 42 1429T39 1433T36 1436L34 1438Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7B' d='M434 -231Q434 -244 428 -250H410Q281 -250 230 -184Q225 -177 222 -172T217 -161T213 -148T211 -133T210 -111T209 -84T209 -47T209 0Q209 21 209 53Q208 142 204 153Q203 154 203 155Q189 191 153 211T82 231Q71 231 68 234T65 250T68 266T82 269Q116 269 152 289T203 345Q208 356 208 377T209 529V579Q209 634 215 656T244 698Q270 724 324 740Q361 748 377 749Q379 749 390 749T408 750H428Q434 744 434 732Q434 719 431 716Q429 713 415 713Q362 710 332 689T296 647Q291 634 291 499V417Q291 370 288 353T271 314Q240 271 184 255L170 250L184 245Q202 239 220 230T262 196T290 137Q291 131 291 1Q291 -134 296 -147Q306 -174 339 -192T415 -213Q429 -213 431 -216Q434 -219 434 -231Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3A6' d='M312 622Q310 623 307 625T303 629T297 631T286 634T270 635T246 636T211 637H184V683H196Q220 680 361 680T526 683H538V637H511Q468 637 447 635T422 631T411 622V533L425 531Q525 519 595 466T665 342Q665 301 642 267T583 209T506 172T425 152L411 150V61Q417 55 421 53T447 48T511 46H538V0H526Q502 3 361 3T196 0H184V46H211Q231 46 245 46T270 47T286 48T297 51T303 54T307 57T312 61V150H310Q309 151 289 153T232 166T160 195Q149 201 136 210T103 238T69 284T56 342Q56 414 128 467T294 530Q309 532 310 533H312V622ZM170 342Q170 207 307 188H312V495H309Q301 495 282 491T231 469T186 423Q170 389 170 342ZM415 188Q487 199 519 236T551 342Q551 384 539 414T507 459T470 481T434 491T415 495H410V188H415Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6E' d='M21 287Q22 293 24 303T36 341T56 388T89 425T135 442Q171 442 195 424T225 390T231 369Q231 367 232 367L243 378Q304 442 382 442Q436 442 469 415T503 336T465 179T427 52Q427 26 444 26Q450 26 453 27Q482 32 505 65T540 145Q542 153 560 153Q580 153 580 145Q580 144 576 130Q568 101 554 73T508 17T439 -10Q392 -10 371 17T350 73Q350 92 386 193T423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 180T152 343Q153 348 153 366Q153 405 129 405Q91 405 66 305Q60 285 60 284Q58 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7D' d='M65 731Q65 745 68 747T88 750Q171 750 216 725T279 670Q288 649 289 635T291 501Q292 362 293 357Q306 312 345 291T417 269Q428 269 431 266T434 250T431 234T417 231Q380 231 345 210T298 157Q293 143 292 121T291 -28V-79Q291 -134 285 -156T256 -198Q202 -250 89 -250Q71 -250 68 -247T65 -230Q65 -224 65 -223T66 -218T69 -214T77 -213Q91 -213 108 -210T146 -200T183 -177T207 -139Q208 -134 209 3L210 139Q223 196 280 230Q315 247 330 250Q305 257 280 270Q225 304 212 352L210 362L209 498Q208 635 207 640Q195 680 154 696T77 713Q68 713 67 716T65 731Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-30' d='M96 585Q152 666 249 666Q297 666 345 640T423 548Q460 465 460 320Q460 165 417 83Q397 41 362 16T301 -15T250 -22Q224 -22 198 -16T137 16T82 83Q39 165 39 320Q39 494 96 585ZM321 597Q291 629 250 629Q208 629 178 597Q153 571 145 525T137 333Q137 175 145 125T181 46Q209 16 250 16Q290 16 318 46Q347 76 354 130T362 333Q362 478 354 524T321 597Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ3-28' x='0' y='-1'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='736' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6B' x='1015' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='1536' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2212' x='2037' y='0'%3e%3c/use%3e %3cg transform='translate(3037%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='880' y='583'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-5B' x='4114' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='4392' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-5D' x='5271' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJSZ3-29' x='5549' y='-1'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='6286' y='0'%3e%3c/use%3e %3cg transform='translate(6786%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-6E' x='1021' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='8033' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='8812' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7B' x='9868' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='10369' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-7D' x='10869' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Sonuç olarak çok serbestlik dereceli bir sistemde çözüm sonucu serbestlik derecesi kadar açısal frekans ωn ve karşı gelen mod şekli {Φn} elde edilir. Mod şekli sistemin ilgili frekansla titreşimi sırasında aldığı konumu gösterir. n 'inci mod için titreşim periyodu Tn ile açısal frekans arasındaki ilişki aşağıdaki gibidir. Dinamik analiz sonucunda elde edilen periyot değerleri bu şekilde elde edilir.
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-54' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-6E' x='826' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1386' y='0'%3e%3c/use%3e %3cg transform='translate(2165%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='1267' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(98%2c676)'%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-3C0' x='500' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(60%2c-686)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-6E' x='880' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Herhangi bir titreşim modunda yerdeğiştirmeler, aralarındaki oran sabit kalmak koşulu ile herhangi bir değeri alabilir. Mod vektörleri, hem kütle matrisine hem de rijitlik matrisine göre ortogonallik özelliği gösterir. Bu özellik kullanılarak herhangi bir modda en büyük genlik birim değer alınarak aynı moddaki diğer genlikler de en büyük genliğe oranlanarak ilgili modun normalize işlemi yapılmaktadır.
TBDY 4B.1 'de anlatılan Modal Hesap Parametreleri hesaplarında bu normalize edilmiş mod şekil vektörleri kullanılır. Aşağıdaki resimde örnek bir yapının dinamik analiz sonucunda bulunan mod şekillerinin deformasyon sonuçları gösterilmiştir. Bu değeler aynı zamanda normalize edilmiş mod vektörleri değerleridir. Yarı rijit diyafram çözümü yapıldığından her bir düğüm noktasındaki şekildeğiştirme mod vektörünün bir elemanına karşılık gelmektedir.
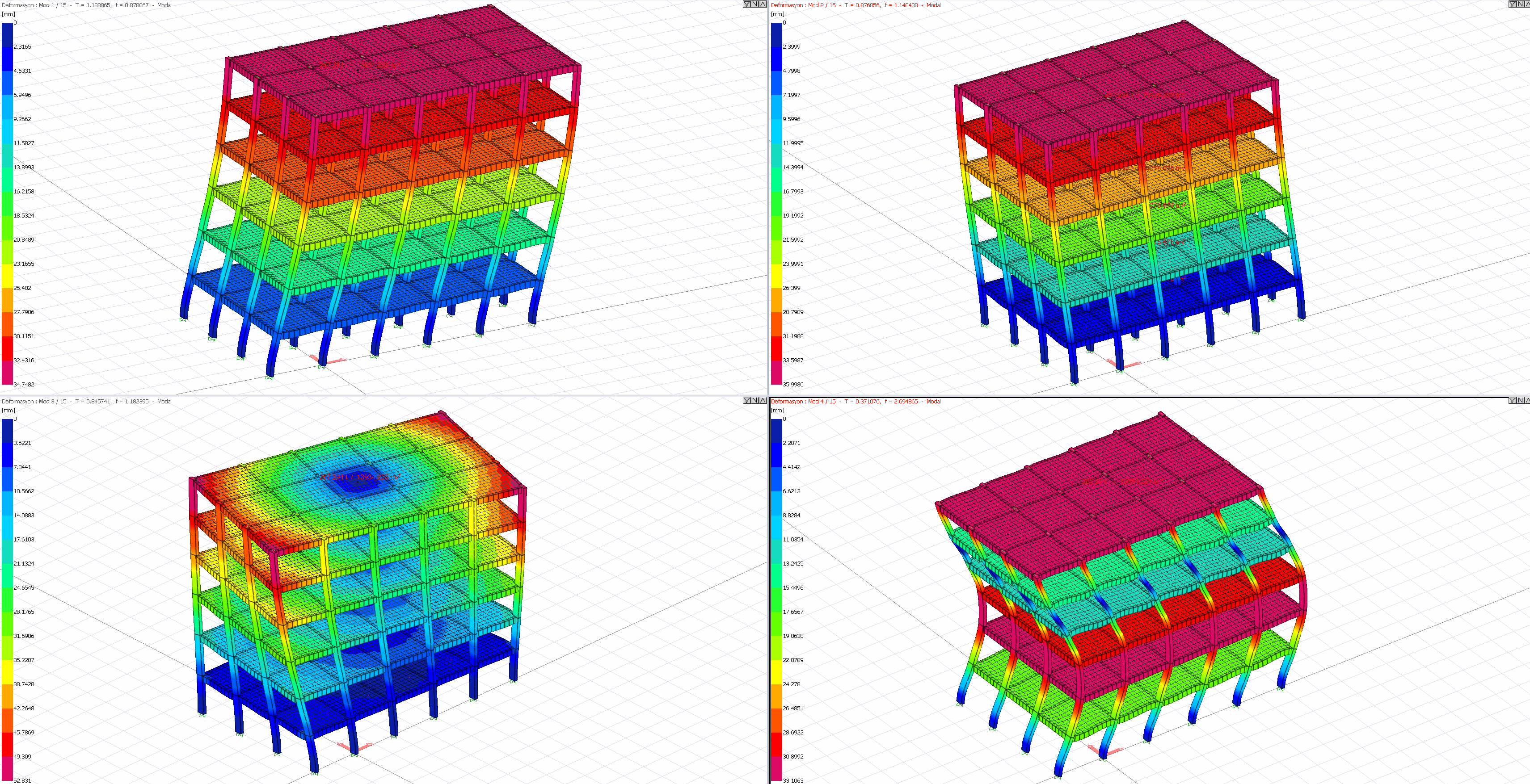
Mod şekillerinde bulunan şekildeğiştirmeler aralarındaki oran sabit kalmak üzere herhangi bir değeri alabilmektedir. Bu sebeple mod şekillerinde hesaplanan şekildeğiştirmeler tasarımda kullanılamaz yalnızca yapının ilgili modundaki titreşim durumunda alacağı şekli gösterebilir. Deprem etkisinin doğru bir şekilde gözönüne alınması için hesaplanan bu mod şekilleri Yatay Elastik Tasarım Spektrumu ile birlikte Mod Birleştirme Yöntemi içerisinde kullanılır.
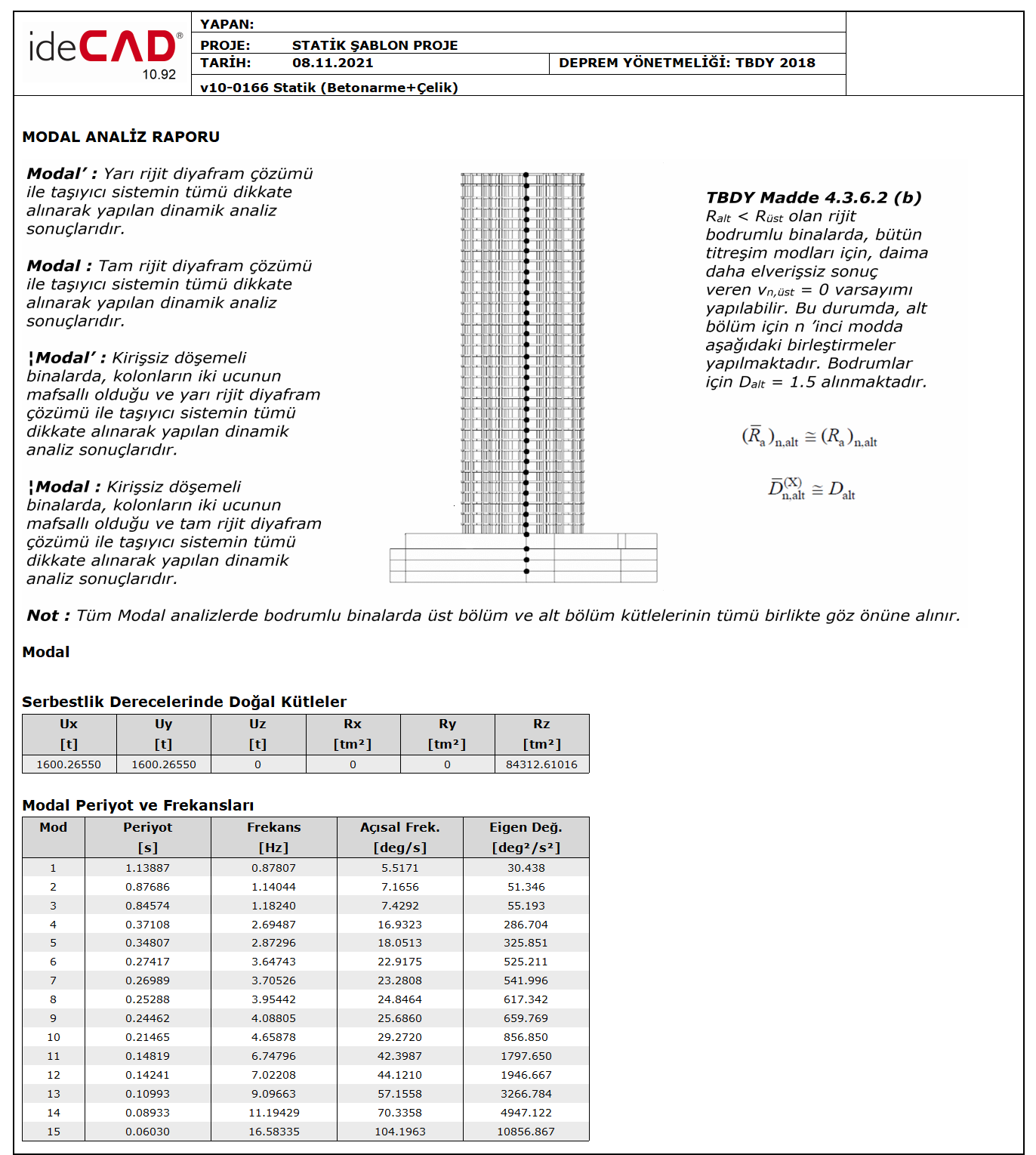
ideCAD Statik 'te yapılan modal analiz sonucunda modal analiz için kullanılan kütleler, her bir mod için hesaplanan doğal titreşim periyotları, açısal frekans değerleri Modal Analiz Raporu 'nda incelenebilir.